3 Multiple changepoints
3.1 Introduction
In real-world data, it is common to encounter situations where more than one change occurs. When applying the CUSUM statistic in such cases, where there are multiple changes, the question arises: how does CUSUM behave, and how can we detect these multiple changes effectively?
3.1.1 Real Example: Genomic Data and Neuroblastoma
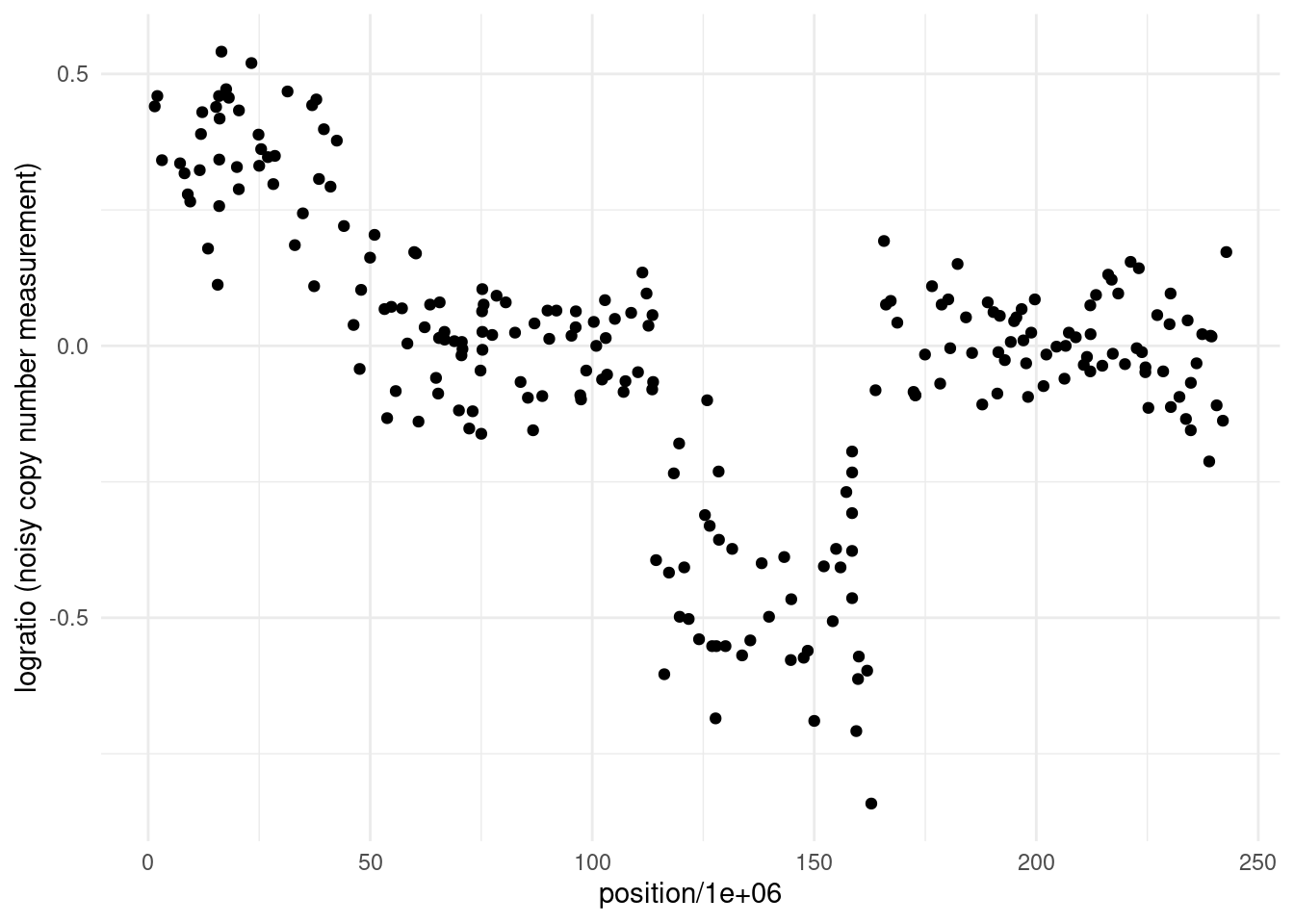
To motivate this discussion, we return to the example from week 1: detecting active genomic regions using ChIP-seq data. Our goal here is to identify copy number variations (CNVs)—structural changes in the genome where DNA sections are duplicated or deleted. These variations can impact gene expression and are linked to diseases like cancer, including neuroblastoma. The dataset we’ll examine consists of logratios of genomic probe intensities, which help us detect changes in the underlying DNA structure.
Statistically, our objective is to segment this logratio sequence into regions with different means, corresponding to different genomic states:
As seen from the plot, the data is noisy, but there are visible shifts in the logratio values, suggesting multiple changes in the underlying copy number. By the end of this chapter, we will segment this sequence!
3.1.2 Towards multiple changes
Under this framework, the observed sequence \(y_t\) can be modeled as a piecewise constant signal with changes in the parameter, occurring at each changepoint \(\tau_1, \dots, \tau_k, \dots, \tau_K\), where \(\tau_k < \tau_{k+1}\), with \(K\) being the maximum number of changes that we have in the sequence, corresponding to \(K+1\) segments. Also - for the sake of notation, in the rest of this module we will set \(\tau_0 = 0\) and \(\tau_{K+1} = n\).
Multiple Changes-in-Mean. A plausible model for the change-in-mean signal is given by
\[ y_t = \mu_k + \epsilon_t, \quad \text{for} \ \tau_k + 1 \leq t < \tau_{k+1}, \ k = 0, 1, \dots, K, \]
where \(\mu_k\) is the mean of the \(k\)-th segment, and \(\epsilon_t \sim \mathcal{N}(0, \sigma^2)\) are independent Gaussian noise terms with mean 0 and (known) variance \(\sigma^2\).
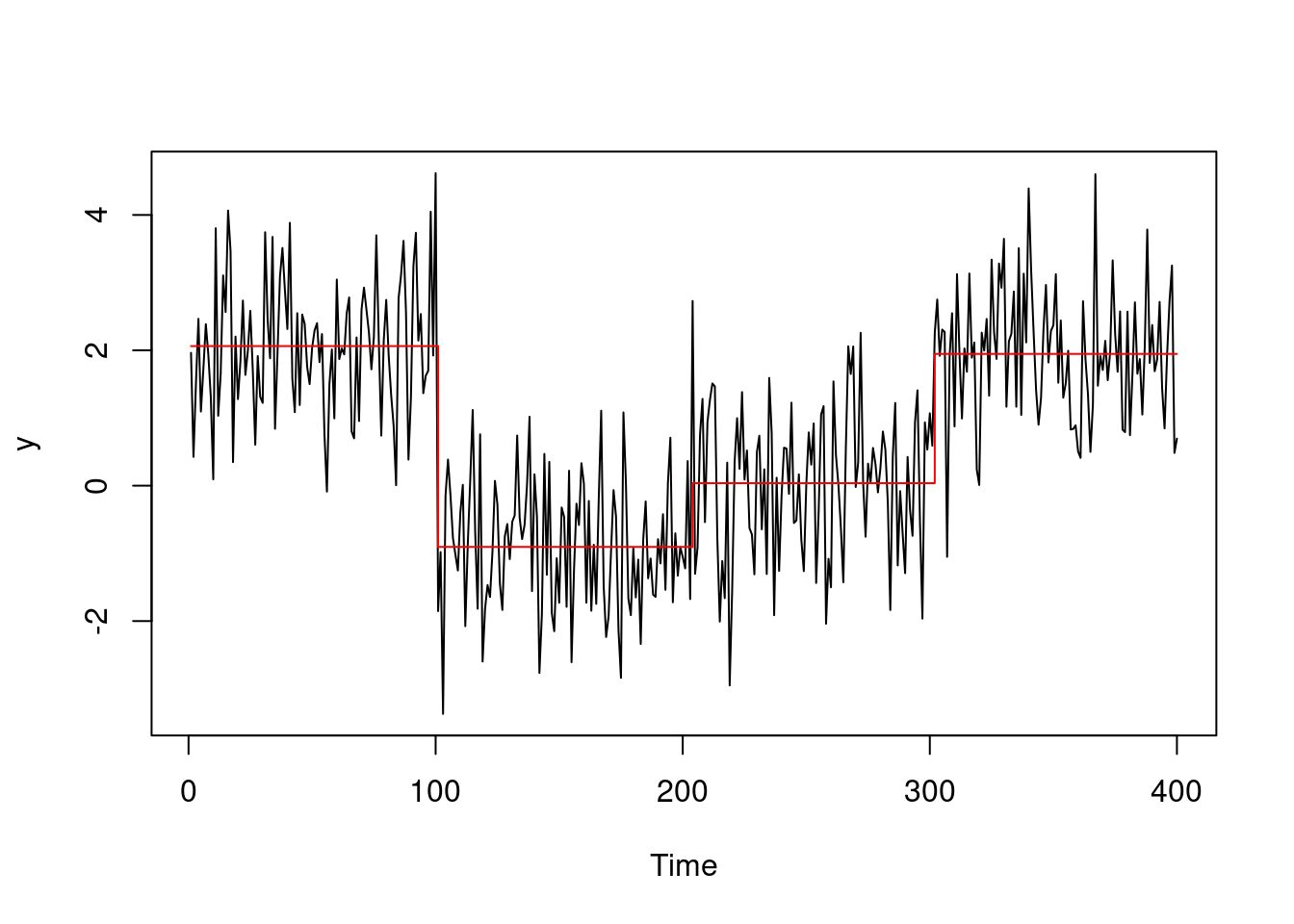
As a starting example, we can generate a sequence with 4 segments, with \(\tau_1 = 50, \tau_2 = 100, \tau_3 = 150\) and means \(\mu_1 = 2, \mu_2 = 0, \mu_3 = -1\) and \(\mu_4 = 2\). Running the CUSUM statistic in this scenario with multiple changes, leads to the following \(C_\tau^2\) trace:

One thing we could do, would be to set a threshold, say 50, record the windows over which the CUSUM is over the threshold, and pick the argmax in each of our windows as the candidate changepoints.
However, from this simple example we notice that we miss already one changepoint, that of time 200… In fact, in some scenarios, such as this one, detection power of the CUSUM statistic lost when there is more then one change in our test.
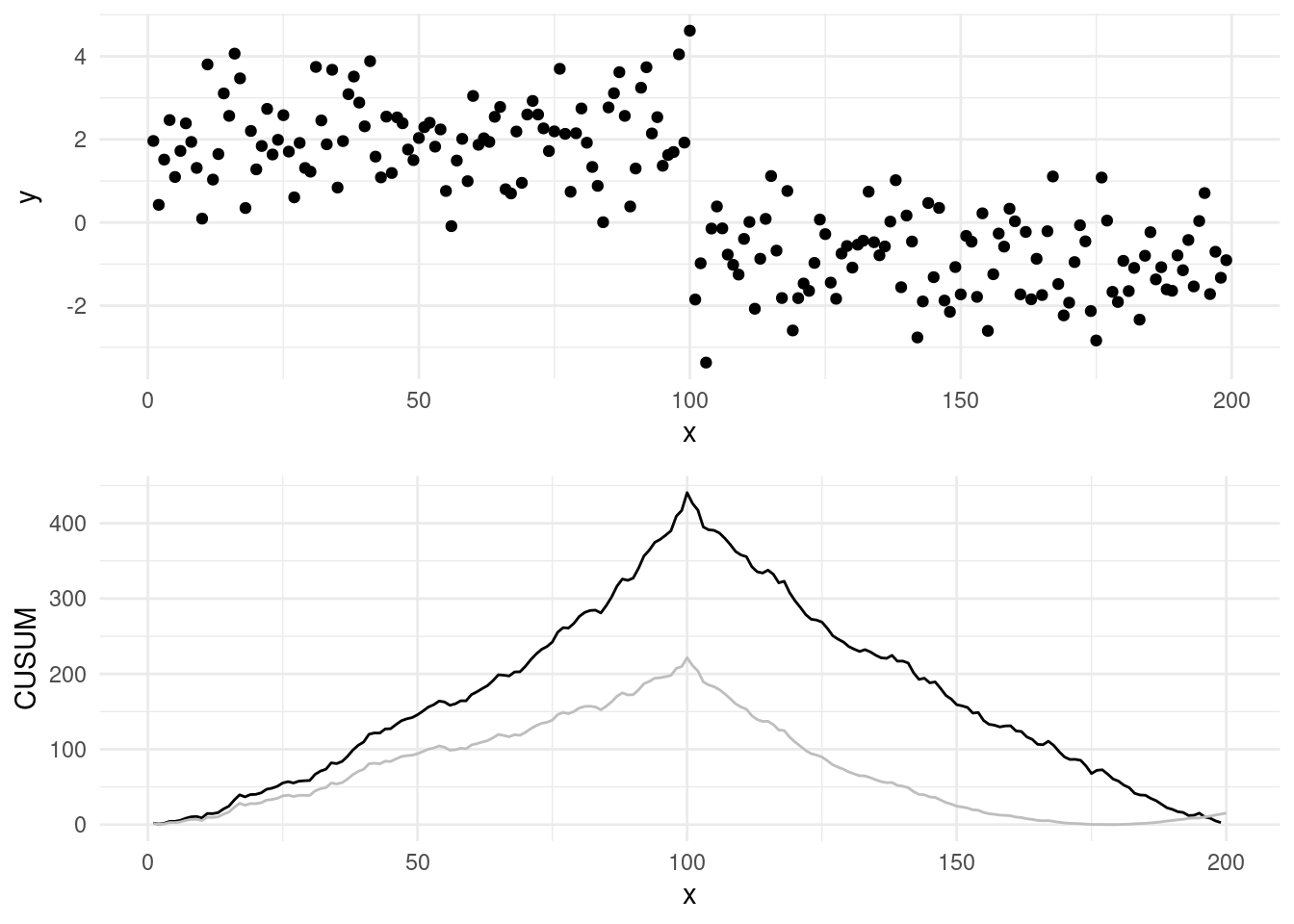
To make it even worse, if we compare the values of the CUSUM statistic ran on the whole dataset (as above), against with the values of the CUSUM, ran on a subset limited to only only the first two segments \(y_{1:200}\):
Warning: Removed 199 rows containing missing values or values outside the scale range
(`geom_line()`).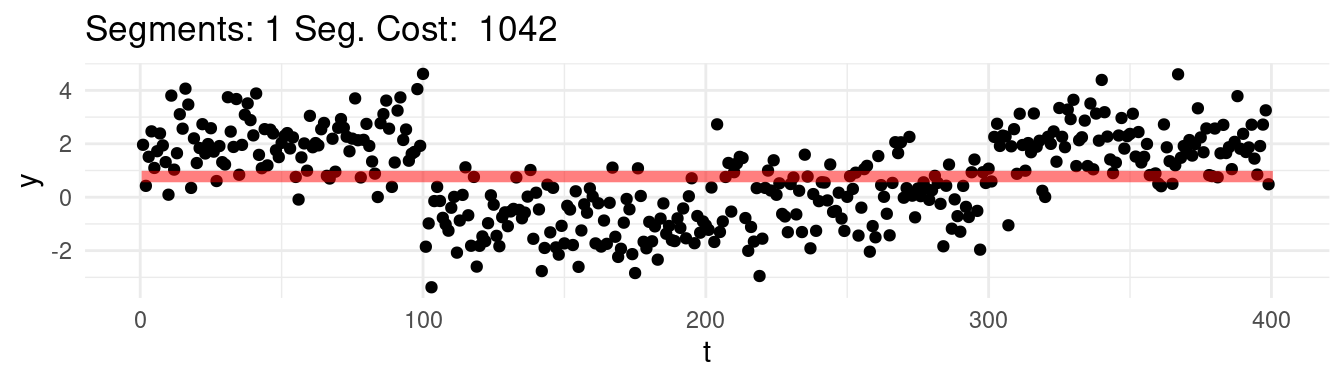
We can see that max of the CUSUM across the entire dataset (the line in grey, that we computed before) is much lower than the one where we isolate the sequence on one single change!
So there is an effective loss of power in this scenario when analyzing all changes together, as some segments means are masking the effects of others with the CUSUM…
This gives us motivation to move towards some strategy that tries to estimate all changes locations jointly, rather then looking for one!
3.1.3 The cost of a segmentation
Well, so far we only worked with one scheme that tried to split a sequence in a hald
But how can we work in case we have more than one change? Well, we need to introduce the cost of a segment.
3.1.3.1 The cost of a segment
If we assume the data is independent and identically distributed within each segment, for segment parameter \(\theta\), then this cost can be obtained through:
\[ \mathcal{L}(y_{s+1:t}) = \min_\theta \sum_{i = s + 1}^{t} - 2 \log(f(y_i, \theta)) \tag{3.1}\]
with \(f(y, \theta)\) being the likelihood for data point \(y\) if the segment parameter is \(\theta\). Note, as the parameter of interest is \(\theta\), we can remove all constant terms with respect to \(\theta\), as those will not affect our optimization.
Example. Now, for example, in the Gaussian case, recall our p.d.f. is given by:
\[ f(y_i, \theta) = \frac{1}{\sqrt{2\pi \sigma^2}} \exp\{-\frac{1}{2 \sigma^2} (y_i - \mu)^2\}. \] Taking the log and summing across all data points in the segment:
\[ \sum_{i = s + 1}^{t} -2 \log f(y_i | \theta) = -2 \left [ -\frac{t - s}{2} \log(2\pi \sigma^2) -\frac{1}{2 \sigma^2} \sum_{i = s + 1}^{t} (y_t - \mu)^2 \right]. \]
This is minimized for \(\bar{y}_{s+1:t} = \frac{1}{t - s} \sum_{i = s + 1}^{t} y_t\). Therefore, plugging this into our equation Equation 3.1, the cost of a segment will be given by:
\[ \mathcal{L}(y_{s+1:t}) = (t - s) \log(2\pi \sigma^2) + \frac{1}{\sigma^2} \sum_{i = s+1}^{t} \left ( y_i - \bar{y}_{s+1:t} \right)^2. \]
Remember, we can get rid of all constants terms as those do not contribute to our optimization. Doing so, our cost will be simply: \[ \mathcal{L}(y_{s+1:t}) = \frac{1}{\sigma^2} \sum_{i = s+1}^{t} \left ( y_i - \bar{y}_{s+1:t} \right)^2. \]
3.1.3.2 Obtaining the cost of the full segmentation
The cost for the full segmentation will be given by the sum across all segments:
\[ \sum_{k = 0}^K \mathcal{L}(y_{\tau_k+1:\tau_{k+1}}) \]
Interestingly, the cost of a full segmentation is closely related to the LR test. Consider, a single Gaussian change-in-mean, e.g. \(K=1\) at time \(\tau_1 = \tau\), splitting the data into two segments: \(y_{1:\tau}\) and \(y_{\tau+1:n}\). The cost of this segmentation is:
\[ \mathcal{L}(y_{1:\tau}) + \mathcal{L}(y_{\tau+1:n}) = \frac{1}{\sigma^2} \left[\sum_{i=1}^{\tau} (y_i - \bar{y}_{1:\tau})^2 + \sum_{i=\tau+1}^{n} (y_i - \bar{y}_{(\tau+1):n})^2 \right] \]
Which is essentially minus the LR test as we saw last week, without the null component. Specifically, for one change, minimizing the segmentation cost over all possible changepoints locations \(\tau\) is equivalent to maximizing the CUSUM statistic.
3.1.4 The “best” segmentation
We now have a way of evaluating how “good” a segmentation is, so it’s only natural to ask the question: what would be the best one?
Well, one way would be to, say, finding the the best set of \(\tau = \{ \tau_0, \dots, \tau_{K+1} \}\) changepoints that minimise the cost:
\[ \min_{\substack{K \in \{0, \ \ldots, \ n - 1\}\\ \tau_1, \dots, \tau_K}} \sum_{k = 0}^K \mathcal{L}(y_{\tau_k+1:\tau_{k+1}}). \]
Which one would this be? Say that for instance we range the \(K = 1, \dots, n-1\), and at each step we find the best possible segmentation. Graphically, we would be observing the following:
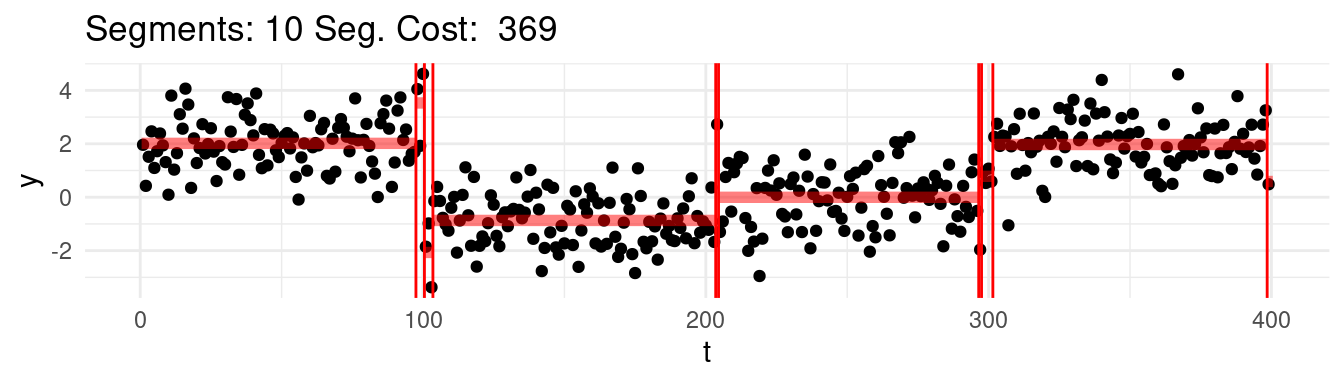
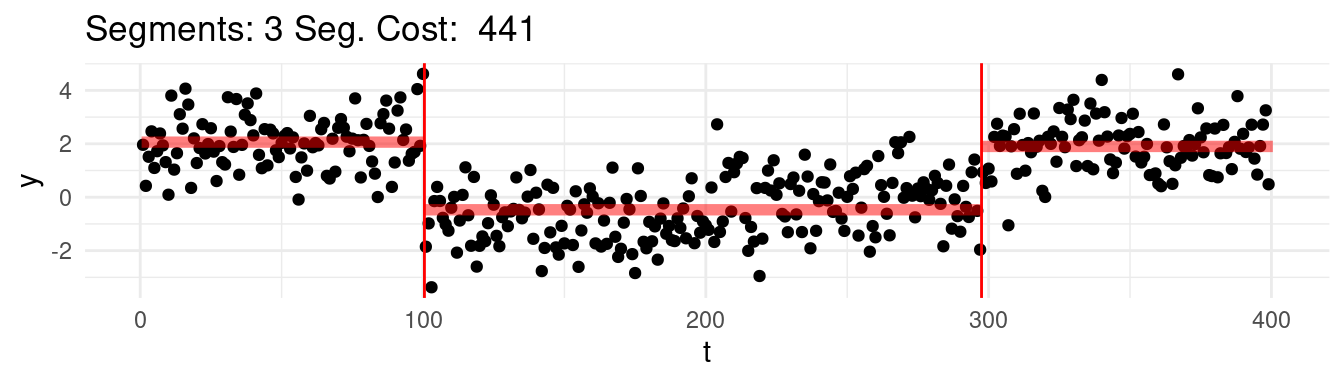
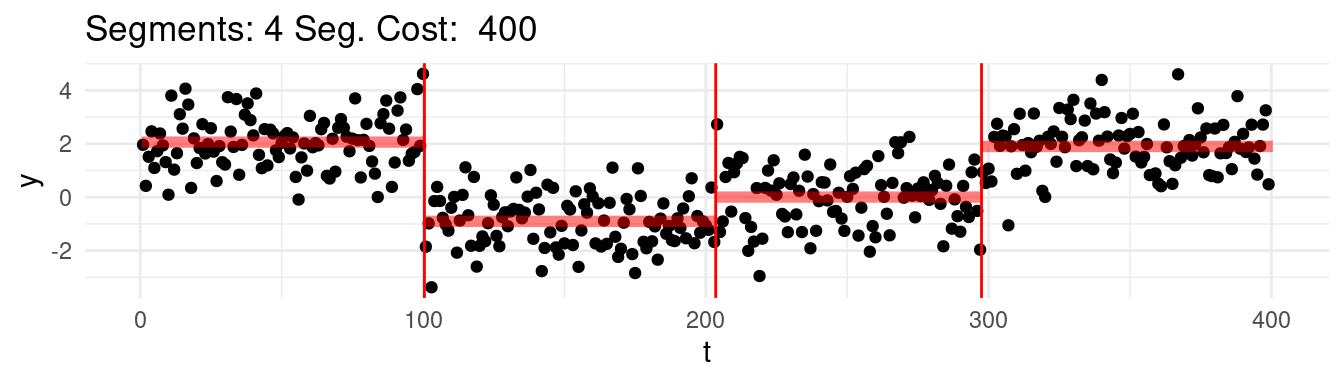
Well, arguably we would like to stop at 4, which we know is the real number of segments, but the cost keep going down…

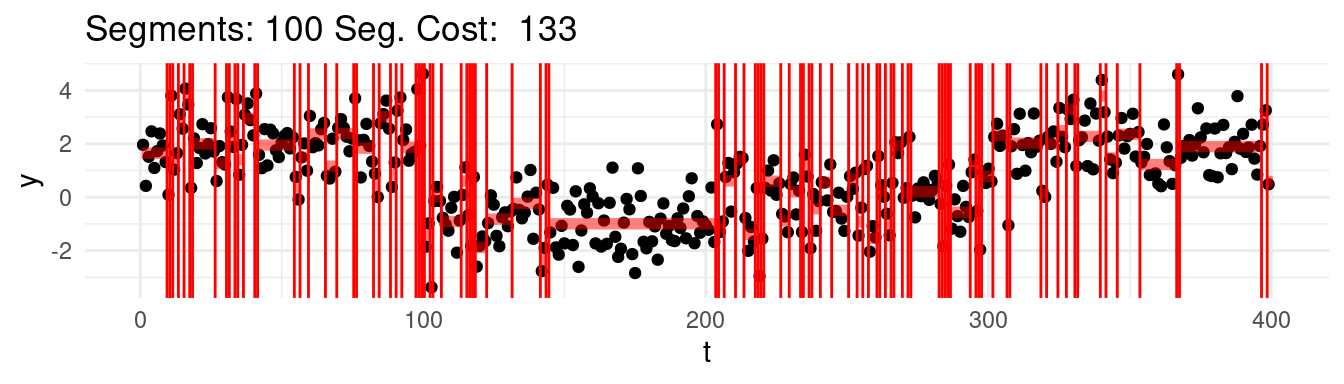
And finally:

Well, it turns out, that according to the minimization above, the optimal segmentation across all would be the one that puts each point into its own segment!
Well, there are different solutions to this problem. The first one we will see, is a divide-and-conquer greedy approach, called Binary Segmentation, and the second one will aim a generating a different optimization to the one below that will find the optimal segmentation up to a constant to avoid over-fitting!
3.2 Binary Segmentation
Binary Segmentation (BS) is a procedure from Scott and Knott (1974) and Sen and Srivastava (1975). Binary segmentation works like this:
- Start with a test for a change \(\tau\) that splits a sequence into two segments and to check if the cost over those two segments, plus a penalty \(\beta \in \mathbb{R}\), is smaller then the cost computed on the whole sequence: \[ \mathcal{L}(y_{1:\tau}) + \mathcal{L}(y_{\tau+1:n}) + \beta < \mathcal{L}(y_{1:n}) \tag{3.2}\]
where the segment cost \(\mathcal{L}(\cdot)\), is as in Equation 3.1.
If the condition in Equation 3.2 is true for at least one \(\tau \in 1, \dots, n-1\), then the \(\tau\) that minimizes \(\mathcal{L}(y_{1:\tau}) + \mathcal{L}(y_{\tau+1:n})\) is picked as a first changepoint and the test is then performed on the two newly generated splits. Otherwise, return no changes in the current split. This step is repeated until no changes are present on all resulting sub-splits.
If there are no more resulting valid splits, then the procedure ends.
Some of you might have noted how the condition in Equation 3.2 is closely related to the LR test in Equation 2.2. In fact, rearranging equation above, gives us:
\[ - \mathcal{L}(y_{1:n}) + \mathcal{L}(y_{1:\tau}) + \mathcal{L}(y_{\tau+1:n}) = - \frac{LR_\tau}{2} < -\beta. \]
The \(-\beta\) acts exactly as the constant \(c\) for declaring a change, and it adds a natural stopping condition, solving the issue of overfitting that we mentioned in the previous section! Binary Segmentation, in fact, does nothing more then iteratively running a LR test, until no changes are found anymore!
This gives us a strategy to essentially apply a test that is locally optimal for one change, such as the Likelihood Ratio test, to solve a multiple changepoint segmentation. For this reason, BS is often employed to extend single changepoint procedures to multiple changes procedures, and hence it is one of the most prominent methods in the literature.
3.2.1 Binary Segmentation in action
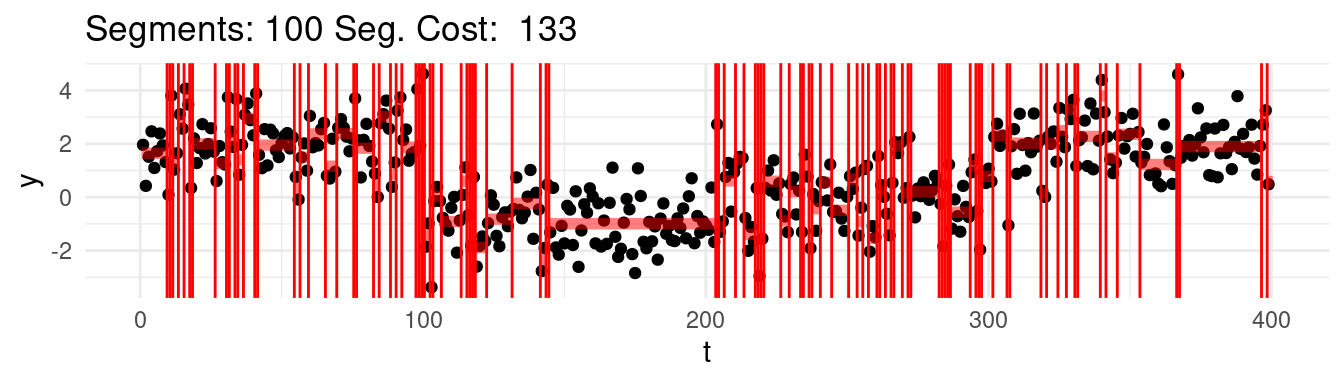
Having introduced the main idea, we show now how binary segmentation works in action with an example above. Say that we set a \(\beta = 2 \log(400) =\) 11.98.
Step 1: We start by computing the cost as in Equation 3.2, and for those that are less then \(\beta\), we pick the smallest. This will be our first changepoint estimate, and the first point of split.
In the plots below, the blue horizontal line is the mean signal estimated for a given split, while in the cusum the pink will represent the values of the LR below the threshold \(\beta\), and red vertical line will show the min of the test statistics. When the cost is below the beta line, this will be our changepoint estimate.
In our case, we can see that the min of our cost has been achieved for \(\hat\tau=100\), and since this is below the threshold, it’s our first estimated changepoint!
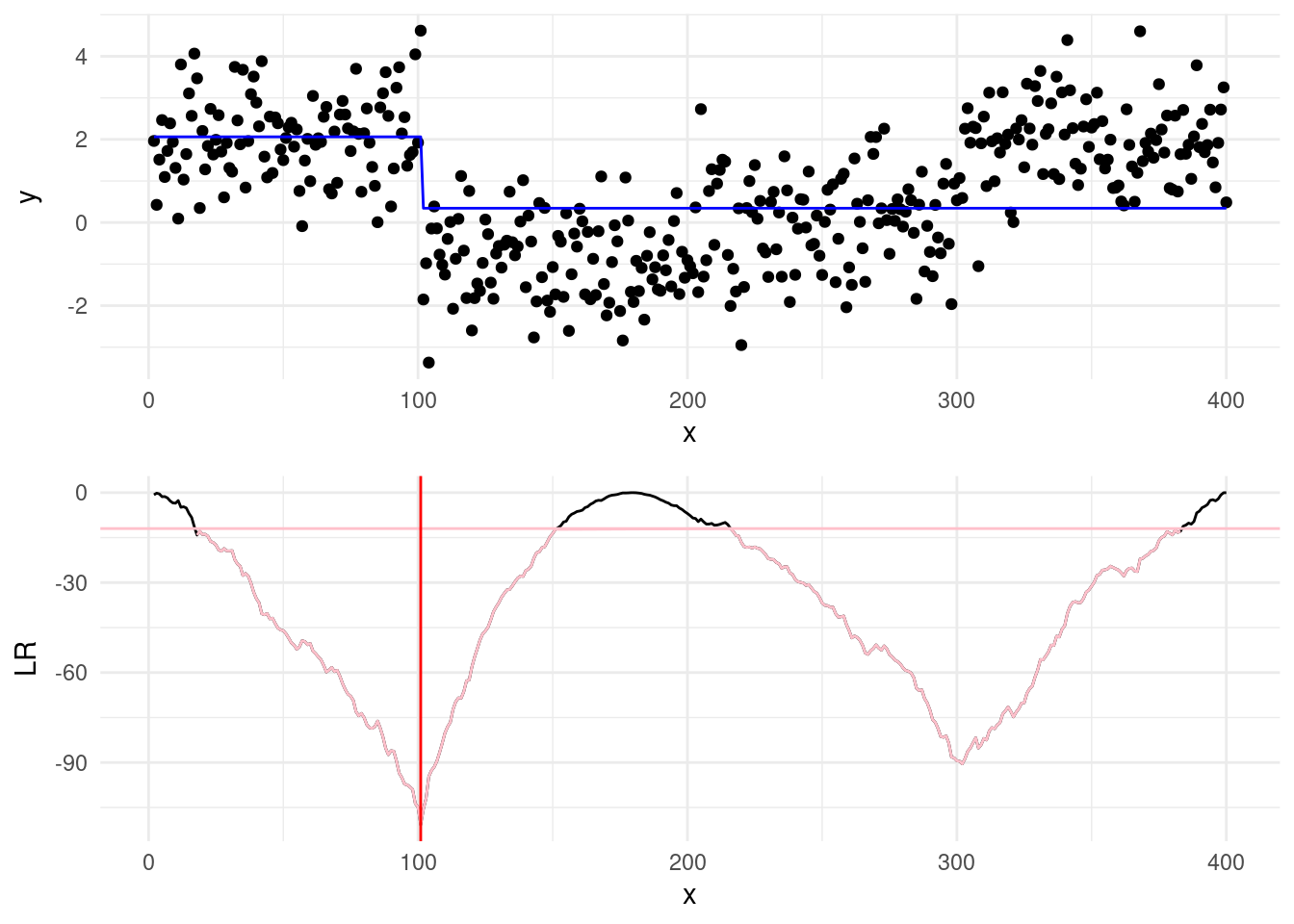
Step 2:
From the first step, we have to check now two splits:
The first left split, 1-LEFT in the plot below, covers data \(y_{1:100}\). We can see that from here, the min of our statistic is below the threshold, therefore we won’t declare any further change in this subset.
The first right split, 1-RIGHT covers data \(y_{101:400}\). We can see that here, the min of the statistics, is below the threshold, and therefore we identify a second change at \(\hat\tau = 297\). This is not exactly 300, so we don’t have a perfect estimate. Despite this is not ideal, this is the best point we have found and therefore we have to continue!

Step 3:
In step 3, we have to check again two splits splits:
The second left split, 2-LEFT in the plot below, covers data \(y_{101:297}\). Now, it’s in this split that the statistics goes below the threshold! The third estimated change is at \(\hat\tau = 203\), again slightly off the real one at 200. We continue investigating this split…
The second right split, 2-RIGHT covers data \(y_{298:400}\). In this last split, the min is not over the threshold, therefore we stop the search.
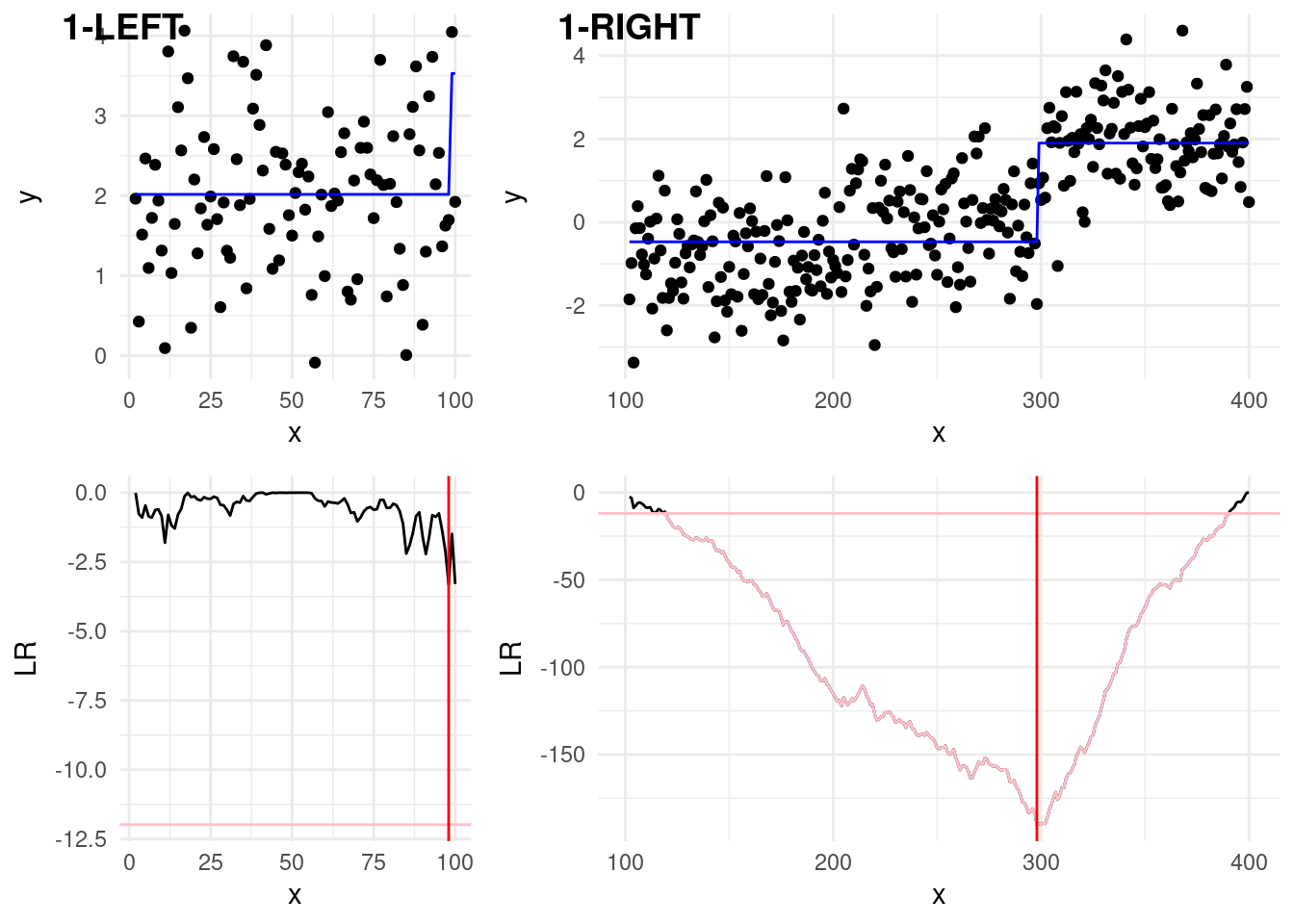
Step 4:
In step 4, we check:
The third left split, 3-LEFT in the plot below, covers data \(y_{101:203}\). The minimum, in here is not over the threshold.
The third right split, 3-RIGHT covers data \(y_{204:298}\). Similarly, the minimum is not over the treshold.
The algorithm therefore terminates!
With this graphical description in mind, we formally describe the Binary Segmentation algorithm as a recursive procedure, where the first iteration would be simply given by \(\text{BinSeg}(y_{1:n}, \beta)\).
\(\text{BinSeg}(y_{s:t}, \beta)\)
INPUT: Subseries \(y_{s:t} = \{y_s, \dots, y_t\}\) of length \(t - s + 1\), penalty \(\beta\)
OUTPUT: Set of detected changepoints \(cp\)
IF \(t - s < 1\)
RETURN \(\{\}\) // No changepoint in segments of length 1 or less
COMPUTE
\(\mathcal{Q} \leftarrow \underset{\tau \in \{s, \dots, t-1\}}{\min} \left[ \mathcal{L}(y_{s:\tau}) + \mathcal{L}(y_{\tau+1:t}) - \mathcal{L}(y_{s:t}) + \beta \right]\)
IF \(\mathcal{Q} < 0\)
\(\hat{\tau} \leftarrow \underset{\tau \in \{s, \dots, t-1\}}{\text{arg}\min} \left[ \mathcal{L}(y_{s:\tau}) + \mathcal{L}(y_{\tau+1:t}) - \mathcal{L}(y_{s:t}) \right]\)
\(cp \leftarrow \{ \hat{\tau}, \text{BinSeg}(y_{s:\hat{\tau}}, \beta), \text{BinSeg}(y_{\hat{\tau}+1:t}, \beta) \}\)
RETURN \(cp\)
RETURN \(\{\}\) // No changepoint if \(-LR/2\) is above penalty \(- \beta\)
OUTPUT: Set of detected changepoints \(cp\)
IF \(t - s < 1\)
RETURN \(\{\}\) // No changepoint in segments of length 1 or less
COMPUTE
\(\mathcal{Q} \leftarrow \underset{\tau \in \{s, \dots, t-1\}}{\min} \left[ \mathcal{L}(y_{s:\tau}) + \mathcal{L}(y_{\tau+1:t}) - \mathcal{L}(y_{s:t}) + \beta \right]\)
IF \(\mathcal{Q} < 0\)
\(\hat{\tau} \leftarrow \underset{\tau \in \{s, \dots, t-1\}}{\text{arg}\min} \left[ \mathcal{L}(y_{s:\tau}) + \mathcal{L}(y_{\tau+1:t}) - \mathcal{L}(y_{s:t}) \right]\)
\(cp \leftarrow \{ \hat{\tau}, \text{BinSeg}(y_{s:\hat{\tau}}, \beta), \text{BinSeg}(y_{\hat{\tau}+1:t}, \beta) \}\)
RETURN \(cp\)
RETURN \(\{\}\) // No changepoint if \(-LR/2\) is above penalty \(- \beta\)
3.3 Optimal Partitioning
Another solution to avoid the over-fitting problem of Equation 3.1 lies in introducing a penalty term that discourages too many changepoints, avoiding overfitting. This is known as the penalised approach.
To achieve this, we want to minimize the following cost function:
\[ Q_{n, \beta} = \min_{K \in \mathbb{N}} \left[ \min_{\substack{\\ \tau_1, \dots, \tau_K}} \sum_{k = 0}^K \mathcal{L}(y_{\tau_k+1:\tau_{k+1}}) + \beta K \right], \tag{3.3}\]
where \(Q_{n, \beta}\) represents the optimal cost for segmenting the data up to time \(n\) with a penalty \(\beta\) that increases with each additional changepoint \(K\). With the \(\beta\) term, for every new changepoint added, the cost of the full segmentation increases, discouraging therefore models with too many changepoints.
Unlike Binary Segmentation, which works iteratively and makes local decisions about potential changepoints, and as we have seen it is prone to errors, solving \(Q_{n, \beta}\) ensures that the segmentation is globally optimal, as in the location of the changes are the best possible to minimise our cost.
Now, directly solving this problem using a brute-force search is computationally prohibitive, as it would require checking every possible combination of changepoints across the sequence: the number of possible segmentations grows exponentially as \(n\) increases…
Fortunately, this problem can be solved efficiently using a sequential, dynamic programming algorithm: Optimal Partitioning (OP), from Jackson et al. (2005). OP solves Equation 3.3 exactly through the following recursion.
We start with \(\mathcal{Q}_{0, \beta} = -\beta\), and then, for each \(t = 1, \dots, n\), we compute:
\[ \mathcal{Q}_{t, \beta} = \min_{0 \leq \tau < t} \left[ \mathcal{Q}_{\tau, \beta} + \mathcal{L}(y_{\tau + 1:t}) + \beta \right]. \tag{3.4}\]
Here, \(\mathcal{Q}_{t, \beta}\) represents the optimal cost of segmenting the data up to time \(t\). The algorithm builds this solution sequentially by considering each possible segmentation \(\mathcal{Q}_{0, \beta},\ \cdots, \mathcal{Q}_{t-2, \beta},\ \mathcal{Q}_{t-1, \beta}\) before the current time \(t\), plus the segment cost up to current time \(t\), \(\mathcal{L}(y_{\tau + 1:t})\).
3.3.1 Optimal partitinioning in action
This recursion can be quite hard to digest, and is, as usual, best described graphically.
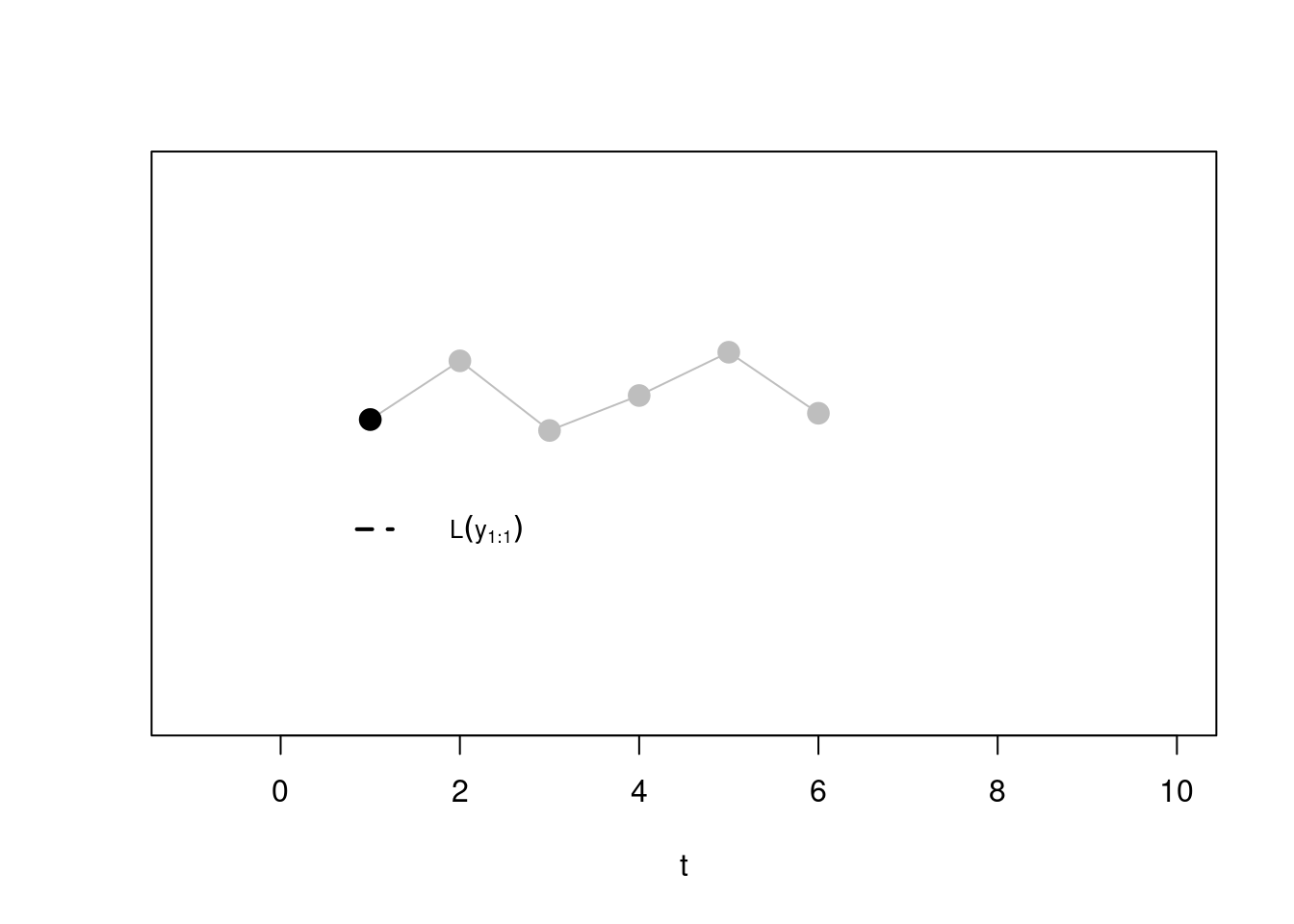
Step 1 Say we are at \(t = 1\). In this case, according to equation above, the optimal cost up to time one will be given by (remember that the \(\beta\) cancels out with \(Q_{0, \beta}\)!):
\[ \mathcal{Q}_{1, \beta} = \left[ -\beta + \mathcal{L}(y_{1:1}) + \beta \right] = \mathcal{L}(y_{1:1}) \]
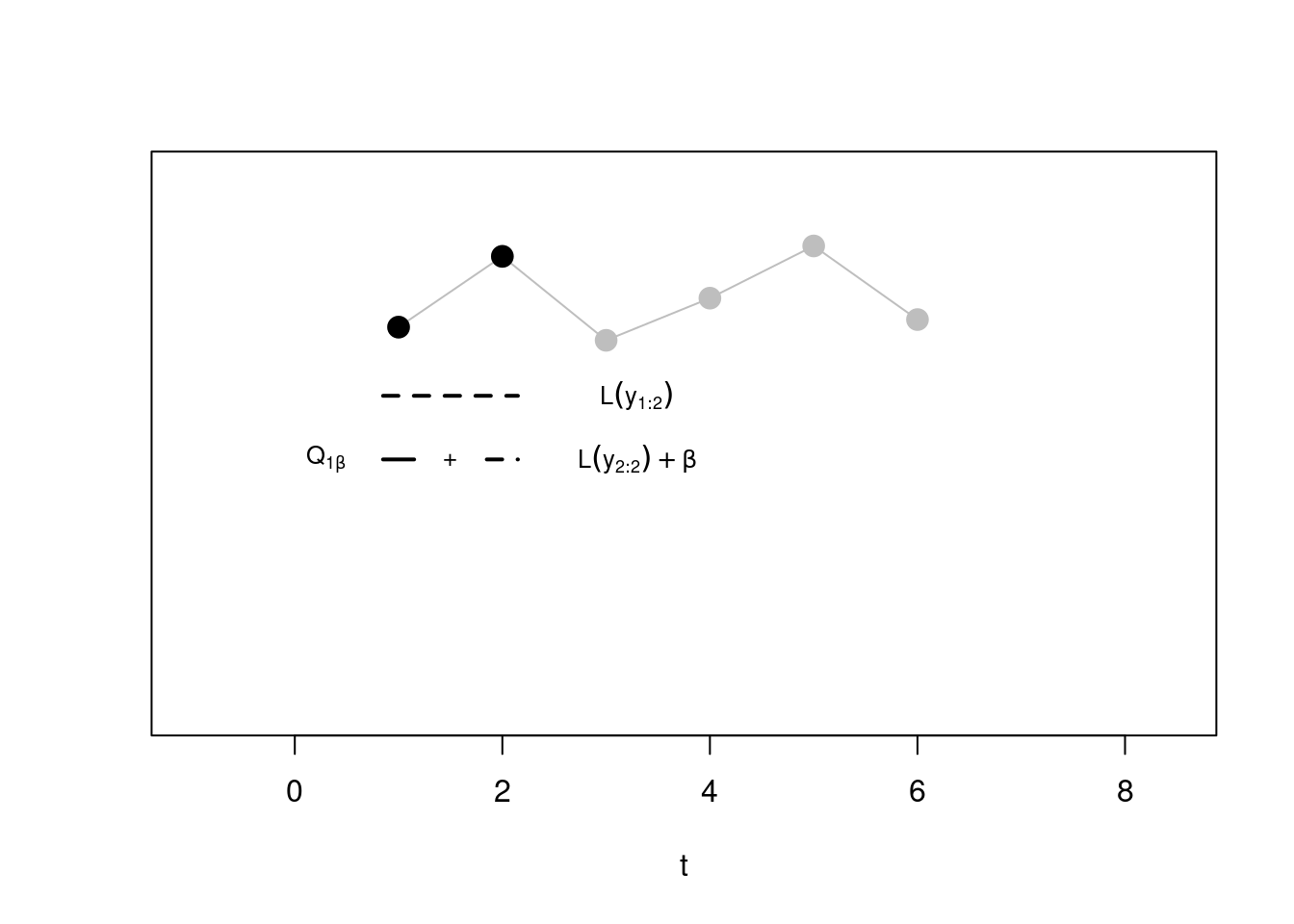
Step 2. Now, at the second step, we have to minimise between two segmentations:
- One with the whole sequence in a second segment alone (again, \(\beta\) cancels out with \(Q_{0, \beta} = -\beta\)), and this will be given by \(\mathcal{L}(y_{1:2})\) (dotted line)
- One with the optimal segmentation from step 1 \(\mathcal{Q}_{1, \beta}\) (whose cost considered only the first point in its own segment!), to which we have to sum the cost relative to a second segment \(\mathcal{L}(y_{2:2})\) that puts the second point alone, and the penalty \(\beta\) as we have added a new segment!
We minimise across the two, and this gives us \(Q_{2, \beta}\).

Step 3: Similarly, at \(t = 3\) we have now three segmentations to choose from:
The one that puts the first three observations in the same segment, whose cost will be given simply by \(\mathcal{L}(y_{1:2})\),
The one considering the optimal segmentation from time 1, plus the cost of adding an extra segment with observation 2 and 3 together
Finally the optimal from segmentation 2, \(\mathcal{Q}_{2, \beta}\), plus the segment cost of fitting an extra segment with point 3 alone. Note that \(\mathcal{Q}_{2, \beta}\) will come from the step before: if we would have been beneficial to add a change, at the previous step, this information is carried over!
Again, we pick the minimum across these three to get \(\mathcal{Q}_{3, \beta}\), and proceed.
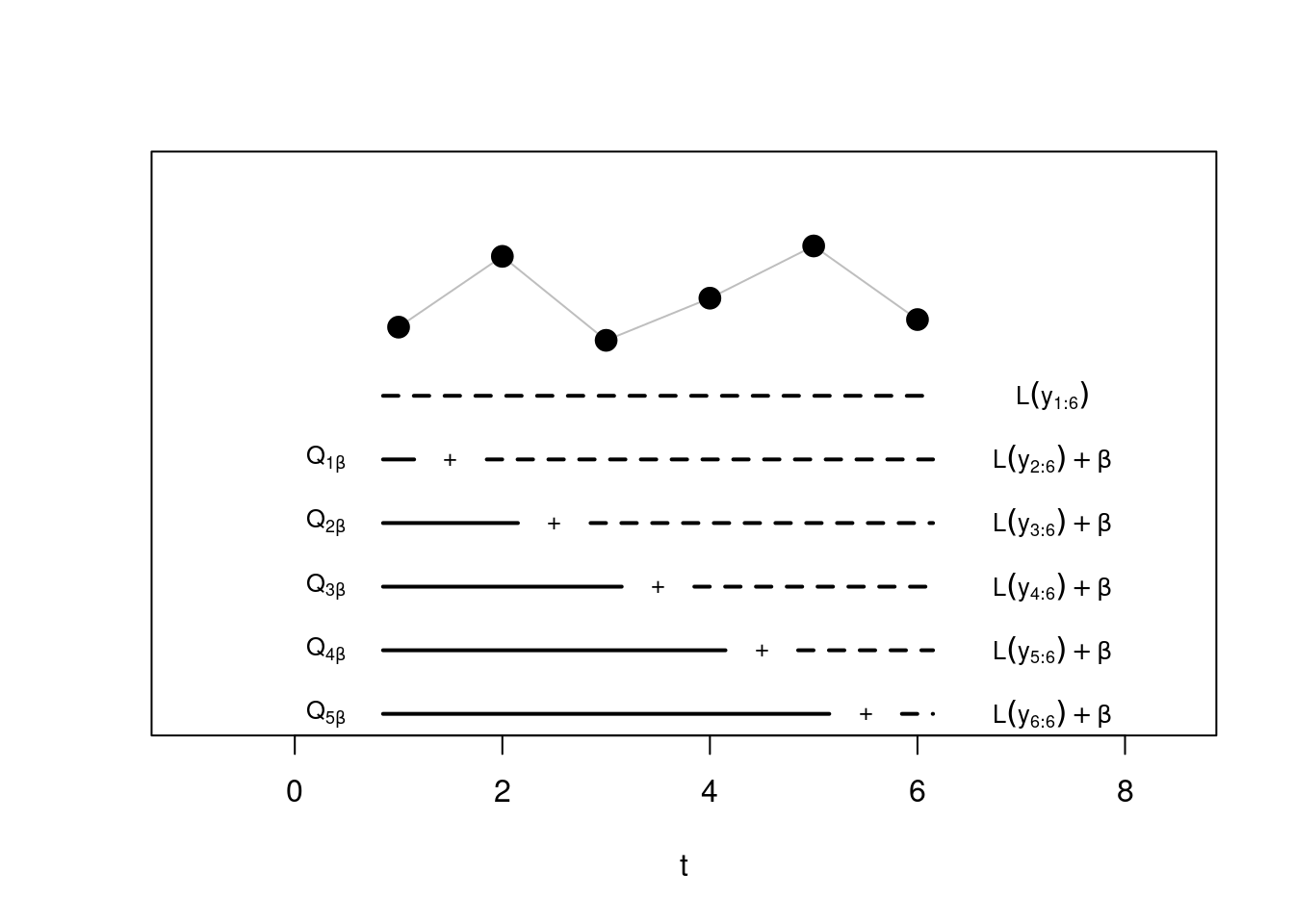
Step \(n\) Until the last step! Which would look something like this:
A formal description of the algorithm can be found below:
INPUT: Time series \(y = (y_1, ..., y_n)\), penalty \(\beta\)
OUTPUT: Optimal changepoint vector \(cp_n\)
Initialize \(\mathcal{Q}_0 \leftarrow -\beta\)
Initialize \(cp_0 \leftarrow []\) // an (empty) vector of change locations.
// Similarly we will store multiple vectors, ordered by time (e.g. \(cp_1, cp_2, \ldots, cp_n\))
FOR \(t = 1, \dots, n\)
\(\mathcal{Q}_t \leftarrow \min_{0 \leq \tau < t} \left[ \mathcal{Q}_{\tau} + \mathcal{L}(y_{\tau + 1:t}) + \beta \right]\)
\(\hat\tau \leftarrow \text{arg}\min_{0 \leq \tau < t} \left[ \mathcal{Q}_{\tau} + \mathcal{L}(y_{\tau + 1:t}) + \beta \right]\)
\(cp_t \leftarrow (cp_{\hat\tau}, \hat\tau)\) // Append the changepoint to the vector at the last optimal point
RETURN \(cp_n\)
OUTPUT: Optimal changepoint vector \(cp_n\)
Initialize \(\mathcal{Q}_0 \leftarrow -\beta\)
Initialize \(cp_0 \leftarrow []\) // an (empty) vector of change locations.
// Similarly we will store multiple vectors, ordered by time (e.g. \(cp_1, cp_2, \ldots, cp_n\))
FOR \(t = 1, \dots, n\)
\(\mathcal{Q}_t \leftarrow \min_{0 \leq \tau < t} \left[ \mathcal{Q}_{\tau} + \mathcal{L}(y_{\tau + 1:t}) + \beta \right]\)
\(\hat\tau \leftarrow \text{arg}\min_{0 \leq \tau < t} \left[ \mathcal{Q}_{\tau} + \mathcal{L}(y_{\tau + 1:t}) + \beta \right]\)
\(cp_t \leftarrow (cp_{\hat\tau}, \hat\tau)\) // Append the changepoint to the vector at the last optimal point
RETURN \(cp_n\)
Note. To implement the line \(\mathcal{Q}_t \leftarrow \min_{0 \leq \tau < t} \left[ \mathcal{Q}_{\tau} + \mathcal{L}(y_{\tau + 1:t}) + \beta \right]\), we could either use an inner for cycle and iteratively compute \(\mathcal{Q}_t\) for each \(\tau\), or we could use a vectorized approach. If we created a vectorized version of our function, it would look something like this:
costs = map_dbl(1:t, \(tau) Q[tau] + L(y[(tau):t]) + beta)
Q[t + 1] = min(costs)
tau_hat = which.min(costs)We range across 1:t as R index starts from 1, so everything is shifted by 1 (that’s why in the cost we have just \(\tau\) instead of \(\tau + 1\). Remember that the map_dbl() function is used to apply a function to each element of a vector and return a new vector. This would be more efficient and faster. We will code the Optimal Partitioning algorithm in the lab.
Running the Optimal Partitioning method on our example scenario, with the same penalty \(\beta = 2 \log(400) =\) 11.98 as above, gives changepoint locations \(\tau_{1:4} = \{100, 203, 301\}\).
Loading required package: zoo
Attaching package: 'zoo'The following objects are masked from 'package:base':
as.Date, as.Date.numericSuccessfully loaded changepoint package version 2.3
WARNING: From v.2.3 the default method in cpt.* functions has changed from AMOC to PELT.
See NEWS for details of all changes.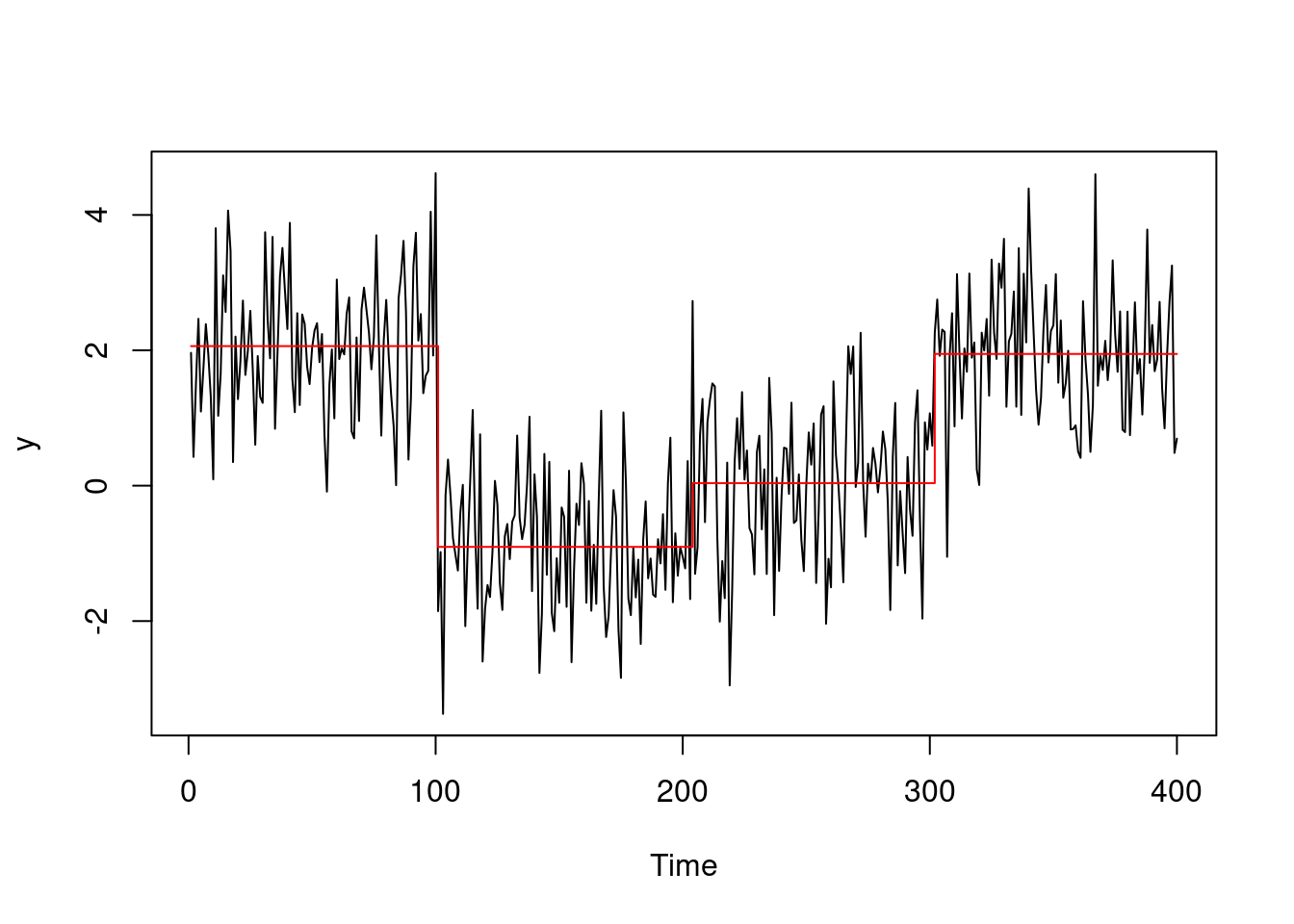
So we can see how on this dataset in particular, OP performs slightly better then Binary Segmentation on the last change, getting closer to the real changepoint of 300!
3.3.2 Neuroblastoma example
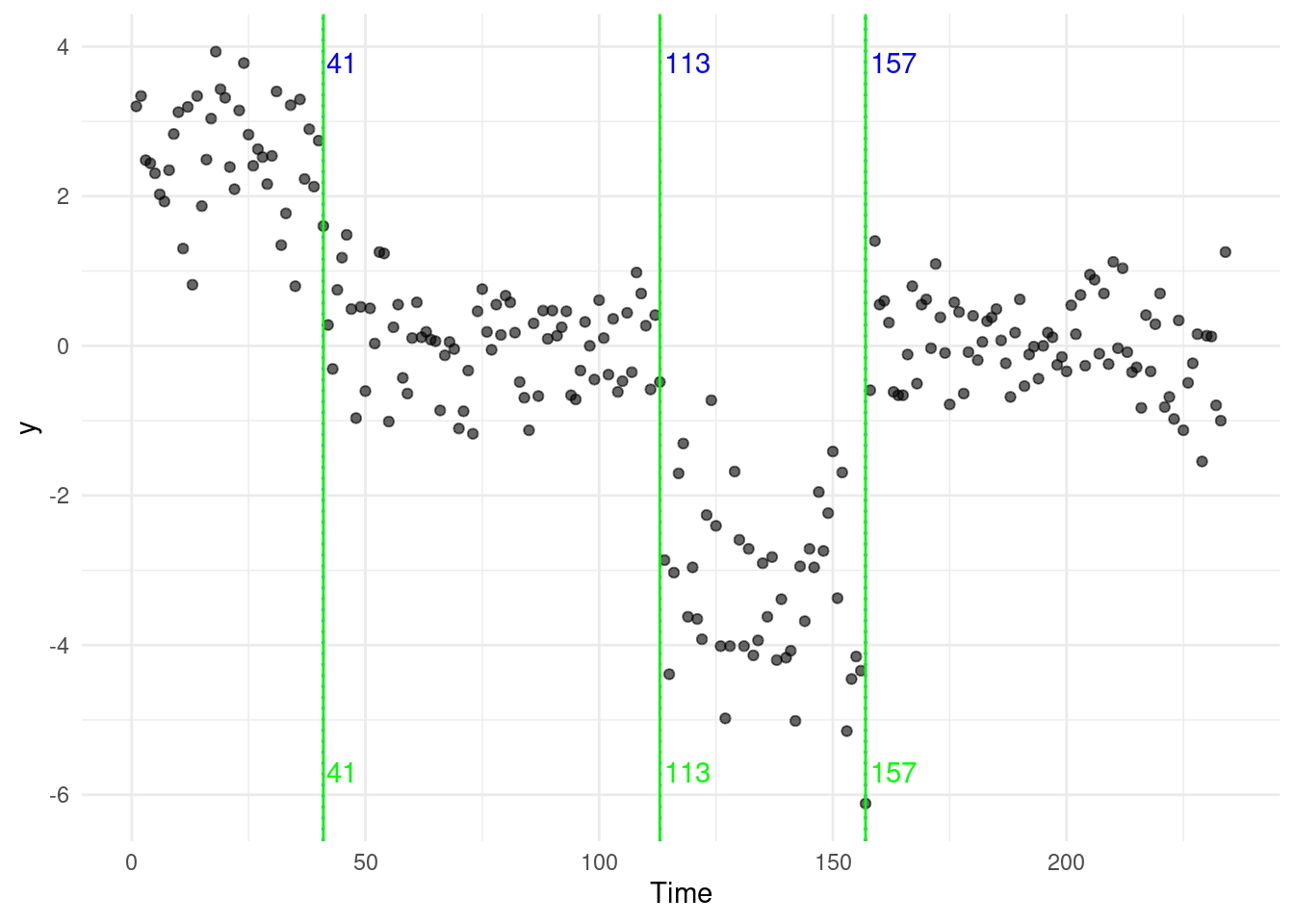
Returning to the original example at the start of the module, the neuroblastoma dataset, we run both Binary Segmentation, and Optimal Partitioning.
We report results in the plot below (blue for BS, green for OP). In this case, the algorithms return the same four changepoints:
Some of you might come up with two (very interesting) questions that hopefully we will answer next week…
If the methods perform roughly the same, which one do I choose?
Why is the data on a different scale then that presented at the start of the chapter?
3.4 Exercises
3.4.1 Workshop 3
For the vector \(y_{1:4} = (0.5, -0.1, 12.1, 12.4)\), variance known \(\sigma^2 = 1\), and a penalty \(\beta = 5\) we will calculate, pen on paper (and calculator), all the Optimal Partitioning and Binary Segmentation steps for the Gaussian change-in-mean case.
To speed up computations, pre-compute all segment costs \(\mathcal{L}(y_{l:u})\). I have pre-computed some of these costs in the table below:
\[ \begin{array}{c|cccc} l \backslash u & 1 & 2 & 3 & 4 \\ \hline 1 & \mathcal{L}(y_{1:1}) & 0.18 & 94.59 & 145.43 \\ 2 & & 0.00 & \mathcal{L}(y_{2:3}) & 101.73 \\ 3 & & & 0.00 & \mathcal{L}(y_{3:4}) \\ 4 & & & & 0.00 \\ \end{array} \]Using the costs from (a), obtain step-by-step the optimal cost \(\mathcal{Q}_{t, \beta}\) of segmenting the data up to time \(t\). Do not forget to compute the changepoints estimates at each iterations.
Using the costs from (a), obtain the Binary Segmentation recursive solution.
Draw a linegraph of some piece-wise constant signal \(\mu\) with more than one change-in-mean, where (with a reasonable penalty/signal-to-noise ratio) Binary Segmentation would consistently reconstruct the wrong signal by under-fitting the changes, but Optimal Partitioning wouldn’t.
3.4.2 Lab 3
- Code the Optimal Partitioning algorithm for the Gaussian change-in-mean case.
Your function should take as input three things:
- A vector
y, our observations - A double
penalty, corresponding to the \(\beta\) penalty of our penalised cost - A function
COST. This function should take as input argumentsy, s, t, and act as \(\mathcal{L}(y_{s:t})\). You fill find a skeleton below. Note: with adequate indexing, you can pass to COST just the datay!
OP <- function (y, penalty, COST) {
### pre-compute all the costs here
### your initialization here
for (t in 1:n) {
### your recursion here
}
return(changepoints)
}For this exercise, we are implementing the Gaussian change-in-mean case. Therefore, a skeleton for our cost function will be:
costMean = function(y, s, t) {
# code for computing the Gaussian change-in-mean cost here
return(your_cost)
}You should be then able to call your OP function as:
set.seed(123)
y <- c(rnorm(100), rnorm(100, 5), rnorm(100, -1))
OP(y, 15, costMean)This should return 100, 200.
**Tips:**
a. Again, you can pre-compute all the possible $\mathcal{L}(y_{l:u})$, for $u \geq l$ to save computational time.
b. Be very careful with indexing... R starts indexing at 1, however, in the pseudocode, you have one element that starts at 0...