Style control - access keys in brackets
6.2. Linear transformations versus matrices
The purpose of this section is to emphasize the following correspondence:
| Linear transformations Composition of functions, |
For every linear transformation we will assign exactly one matrix to it (Definition 6.2.5), and for every matrix there is exactly one linear transformation which it defines (Example 6.1). This type of correspondence is called a bijection or a bijective correspondence, and above this is indicated by the two-way array .
An advantage of writing transformations using matrices is that it makes some computations easier; for example, composition of maps is given by matrix multiplication. If are transformations with matrices respectively, then the composition is equal to . This is, in fact, the reason why matrix multiplication is defined the way it is.
Recall that composition of maps reads right to left, i.e. means ‘first do , then ’. This matters because in general . For convenience, we often write instead of .
Example 6.2.1.
-
Consider the following matrices:
Then their associated linear transformations can be written as
Let’s calculate the composition:
This is the linear transformation associated to the matrix , as expected.
Throughout this section, we consider the Euclidean plane , and transformations . But you should know that linear transformations correspond to matrices in exactly the same way. We will look at the case because it is easiest to visualise.
The standard basis vectors of are (See Definition 1.4.8). So we have already two equivalent ways of writing the same vector, given by the left and right hand sides of the following equation:
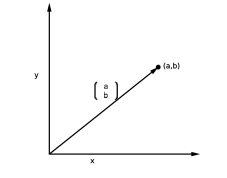
We will use the following notation for points in :
Notice this notation is different from the matrix because of the comma.
Remark 6.2.2.
Points and vectors in can be identified with each other. Explicitly, a point corresponds to the vector from to , , where (see Figure 4). Thus, the convention is that we write the coordinates of points horizontally with commas between them, and the vectors vertically, as column vectors. In practice, it is usually okay to equate the two in your head. We use the notation to emphasize the different perspectives of “vectors” versus “points”, and it is common to switch between the two.
Proposition 6.2.3.
Let be linear transformations. Then the composition is also a linear transformation.
Proof.
Let and pick any vectors . We have
| and | ||||
which proves that LT1 and LT2 hold. ∎
Theorem 6.2.4.
Any linear transformation of is determined by its effect on the standard basis vectors and . In other words, a linear transformation is entirely known if and are given.
Proof.
Since any vector can be written in the form , where , by linearity we have . ∎
Definition 6.2.5.
Given a linear transformation of , and let be defined as
The matrix is called the matrix associated to the linear transformation .
Remark 6.2.6.
-
•
There is nothing special about the case here; this definition could be generalised to higher dimensions.
-
•
In fact, is the matrix of with respect to the standard basis of . In more general situations, such as in MATH220, one could use a different basis, which would produce a different matrix.
-
•
We will also say that is the linear transformation given by the matrix .
Theorem 6.2.7.
Let , be the matrices of the linear transformations and of . Then
-
(i)
.
-
(ii)
(matrix multiplication) is the matrix of the linear transformation .
Proof.
We have that . Thus
This proves part (i).
For part (ii), let be the matrix of , which is a linear transformation by Proposition 6.2.3. So
On the other hand, we have that
Equating coefficients of , we find that , while equating coefficients of , we get . A similar calculation for gives expressions for and in terms of and , and in all four cases we see that is equal to the coefficient of the matrix product defined in Definition 1.4.1; that is, . ∎
Proposition 6.2.8 (Rotation transformations).
In coordinates, anticlockwise rotation through the angle is given by
So a rotation around the origin is represented by the matrix
In particular, it is a linear transformation.
Proof.
Assume the vector makes an angle above the positive -axis. The length of is (see Definition 1.3.5), so we can use polar coordinates to write . When is written in polar coordinates, it makes an angle with the -axis, so we have . Now we can use trigonometric identities as follows:
| and | ||||
This proves the results. ∎
Proposition 6.2.9 (Reflection transformations).
In coordinates, the reflection about the line , whose angle above the -axis is , is given by
So it may be represented by the matrix
In particular, it is a linear transformation.
Proof.
Let be the image of , as in Figure 3. If the vector corresponding to makes an angle above the -axis, then the angle between and is . Therefore, is obtained from by a rotation through . So the angle makes with the -axis is . Therefore, using trigonometric identities and polar coordinates (see the rotational case above),
| and | ||||
∎
Now we have seen the examples of the rotation around the origin, and of a reflection about a line. We found that for any angle , they are represented by the matrices
We showed this by using trigonometric identities. But there is a faster geometric way: consider the Figures 2 and 3, and see where and are mapped:
So the matrices we found in Propositions 6.2.8 and 6.2.9 are correct.
Example 6.2.10.
-
Prove that we have the equality .
-
Solution: The LHS is the composition of the reflection about the -axis followed by the anticlockwise rotation through , while the RHS is the reflection about the line which makes an angle with the -axis. To prove the claim, let us calculate with their associated matrices:
Their associated matrices are equal, and therefore these linear transformations are equal.