Style control - access keys in brackets
6.1. Definition and first examples
Definition 6.1.1.
We will use the word transformation to refer to any function from to . We will write
So if then . In this case we call the image of .
Definition 6.1.2.
A transformation is called a linear transformation if satisfies the two axioms
-
LT1
for all , and
-
LT2
for all and all .
Recall Definition 1.2.1, which says that for , the vector is obtained by multiplying each coordinate by .
Example 6.1.3.
-
The following transformations are linear transformations:
The following transformations are not linear:
Remark 6.1.4.
If is linear, then . Therefore, .
Example 6.1.5.
-
Let , and consider the transformation given by for each . Since is a column vector, the matrix product is also a column vector. defined in this way is a linear transformation. This follows from Lemma 1.4.10. In particular, LT1 is satisfied, because , and LT2 is satisfied because for any . So is called the linear transformation associated to the matrix .
The fundamental result of this section is that all linear transformations come from matrices, in the sense of Example 6.1. Before we make this statement more precise, let’s introduce some of the standard transformations. We will focus on three main types of transformations of : translation, rotation, and reflection. Translation is not a linear transformation (by 6.1.4), but rotation and reflection are.
Definition 6.1.6.
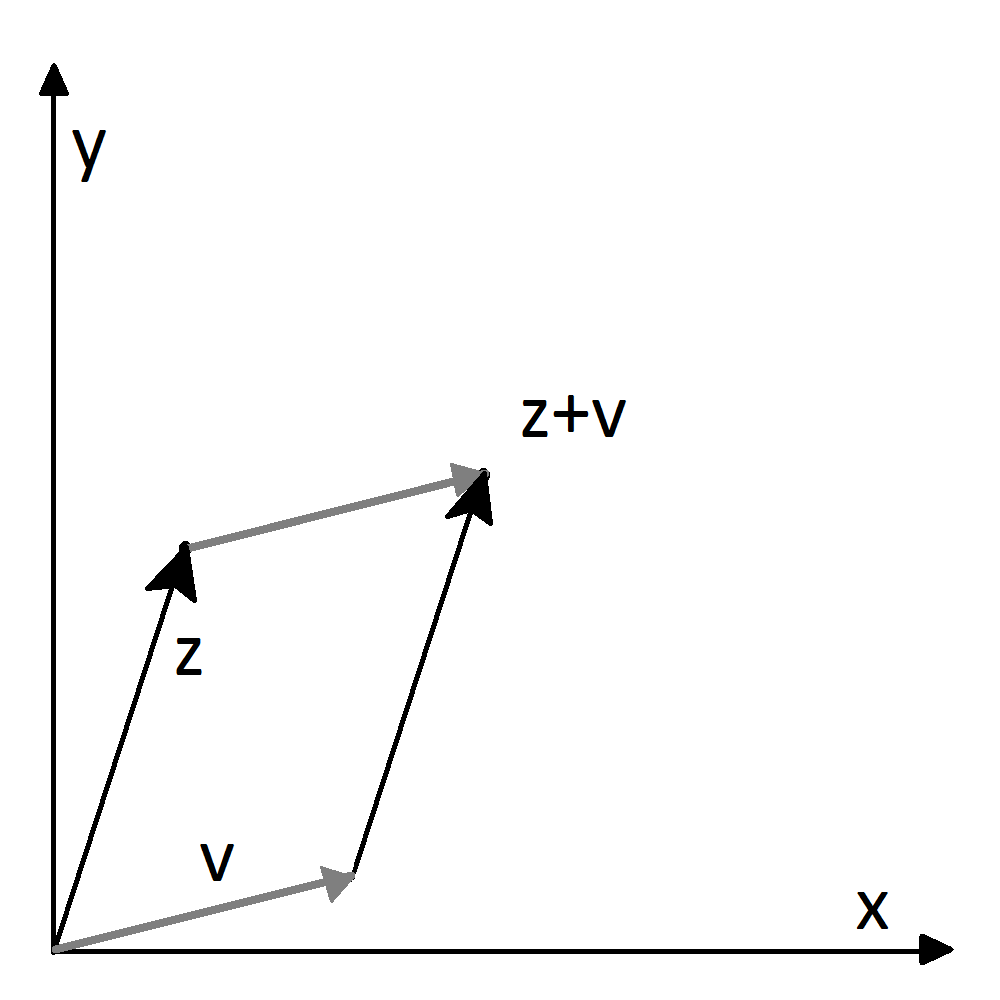
Translation by a vector. This is an example of a transformation which is not linear. Given a vector , the translation by is the transformation given by adding to every vector (See Figure 1). In other words, . It may be written in coordinates as follows:
Definition 6.1.7.
Rotation by an angle. Given an angle (in radians), the rotation through is the anticlockwise rotation through about the origin (see Figure 2).
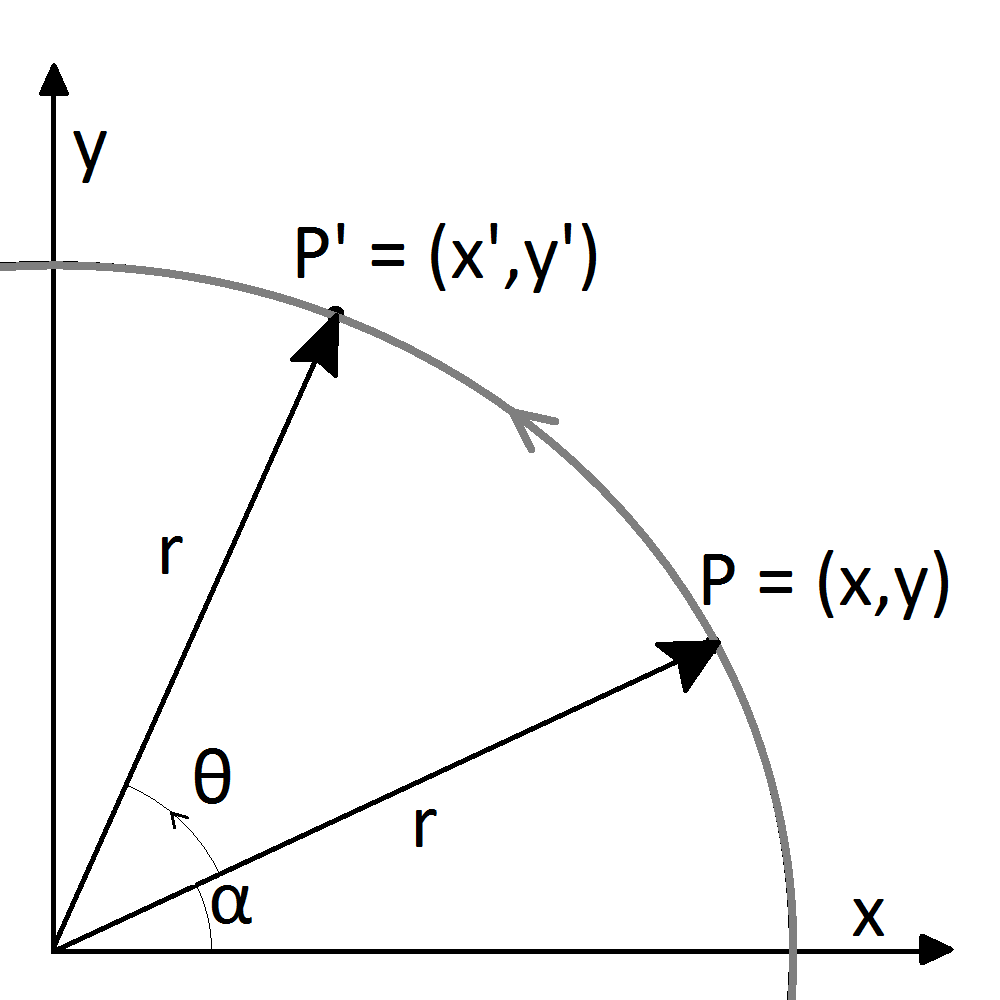
Rotation around the origin is the linear transformation associated to the following matrix (in the sense of Example 6.1):
For the proof of this fact, see Proposition 6.2.8.
Example 6.1.8.
-
-
(a)
When , then nothing is rotated, so the transformation should be the identity transformation. Indeed:
In other words, .
-
(b)
When , rotation by the angle should be the same as negating every vector. Indeed:
-
(a)
Definition 6.1.9.
Reflection about a line. Given a line through the origin which makes an angle above the positive -axis, the reflection about is the transformation mapping any point to its reflection, assuming the line is a mirror.

Reflection about a line through the origin is the linear transformation associated to the following matrix (in the sense of Example 6.1):
For the proof of this fact, see Proposition 6.2.9.
Example 6.1.10.
-
-
(a)
When , the reflecting line is the -axis, so we have
This makes sense, because a reflection in the -axis should simply multiply the -coordinate by .
-
(b)
When , the reflecting line is the -axis, and we have
again, this is as one would expect.
-
(a)