Style control - access keys in brackets
6.3. Invertible linear transformations
Definition 6.3.1.
A linear transformation is invertible (also called non-singular) if there is another linear transformation such that Here denotes the identity transformation . Then is called the inverse of . If does not have an inverse, then it is called non-invertible.
Example 6.3.2.
-
Rotations and reflections are invertible linear transformations of the plane. The inverse operation of rotation by is rotation by . And a reflection composed with itself is the identity. Thus
Theorem 6.3.3.
Let be a linear transformation, and let be its associated matrix. Then
| is invertible if and only if is invertible. |
In this case, is the matrix associated to the inverse of .
Proof.
By assumption, for all . Suppose that is invertible and let be the matrix associated to . Then for each we have
It follows from the Proposition 1.4.9 that . That is, is invertible and as required.
Conversely, if is invertible, we observe that is the matrix associated to the linear transformation which satisfies , that is, we must have that and is invertible. ∎
Recall that a square matrix is invertible if and only if its determinant is non-zero (Theorem 4.4.4).
Example 6.3.4.
-
Find the inverse of .
Solution 1: This is the linear transformation associated to the matrix . We know is invertible since . The inverse of is the linear transformation given by the matrix , by Theorem 6.3.3. We calculate the inverse as follows:and therefore
Hence .
Solution 2: One could also solve this example without matrices as follows. We have invertible if and only if there exists a linear map such thatNow, if , then . So we can use the following equations to solve for in terms of :
Therefore, for all . In other words, .
Theorem 6.3.5.
Invertible linear transformations of the plane preserve lines. That is, given an invertible linear transformation of and a line in , then the image under of the points of form a line , and conversely, each point of is the image under of exactly one point of .
Proof.
A line in is given by a point and a non-zero direction vector . In other words, a point is on if and only if there exists some such that ; in matrix form
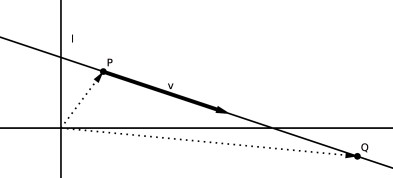
Now, by linearity of we have
Since is invertible, , and therefore lies on the line through the point which has direction vector . Hence, the image of under is a line. Since is invertible, the inverse of maps the line to , saying that there is a bijective correspondence between the points of and those of . ∎
Remark 6.3.6.
If is non-invertible in Theorem 6.3.5, then the result is not true. For example, the zero map, which maps all points to the zero vector, is linear but not invertible. It clearly does not map lines to other lines. As another example, consider the projection onto the -axis, which is the linear transformation corresponding to the matrix . The line , i.e. the -axis, is mapped to the zero vector by , and in particular it is not mapped to a line.
Example 6.3.7.
-
Consider the line in the plane given by the equation
Since , the linear transformation corresponding to is invertible. Find the image of the line by .
Solution 1: First let’s write the line in the form: , for . Let , which clearly lies on . One checks that if , then the line is the set of points , for . Therefore the new line is
Solution 2: Any line is uniquely determined by two of its points. Thus, to find the image of , we pick two distinct points and on , calculate their images and by and write the equation of the line as the line going through and . Let us choose
Note that are indeed on since they both satisfy the equation . We then calculate
So the line going through and has equation: