LAST-MILE DELIVERY
A COMBINATION OF DRONE AND TRUCK FOR DELIVERY
15 th January, 2019

The last mile has emerged as a critical source of opportunity for cost efficiency. And the integration of drones into last mile delivery is quickly becoming attractive due to the potential for reducing labor costs and improving fuel efficiency.
Immediately, there is two question appearing. The first one is why should we use drone, and the second one is why using truck. Apparently, there is four main plus points of operating a drone for delivery. Firstly, it can run without human. Secondly, the traffic jam in road networks is no longer needed to be considered because it is flying over. Thirdly, it is obvious that it runs faster, and then it will take less time to reach customers than trucks. Finally yet importantly, transportation costs per kilometre when operating drone is considerably lower since truck is very heavy and consume more energy.
It seems to be that the advantages of drone is greatly outweigh that of truck. So why we still need truck for delivery. The biggest minus point of the drones is that batteries rather than gasoline power them, therefore their travel distance and lifting power are restricted. It also means that we need to control about the maximum flight distance and the sizes of parcels. However, the benefits of truck is the capacity for long distance and carrying cargo without thinking about a diversity of size and weight.
Clearly, it seems to be optimal if we use both truck and drone for delivering parcels to customers. In order to delivery, the drone must be launched from the truck and later join the truck at another place. Obviously, each customers is delivered only once time and is visited by only one vehicle, either the truck or the drone. Both the truck and the drone have to launch and back to one place which is the warehouse. Because batteries power the drone, we assume that the truck will recharge or change batteries for the drone before the drone start to deliver parcels. Hence, our target is to minimize the total expenditure of two different parts. The first one is the cost of operating a truck and a drone while the second part is the queuing time a truck has to wait for drone and vice- versa. We define the queuing time will be equal to the cost of battery energy consumption of drone, the truck driver’s labour cost and even the parking fee.
Now, we must have some key constraints as following:
(1) Each customer is visited once by either a truck or a drone.
(2) Truck must start from and back to the depot.
(3) Drone deliveries must be compatible with the truck tour.
(4) When the drone is launched from the truck for deliveries, it can not be relaunched before the truck collecting it.
(5) Subtour elimination.
(6) The waiting time and maximum time that the drone can operate without recharging is correctly handled.
(7) Non-negative constraint.
The objective of the problem is to minimize the total operational cost including the travelling cost of both truck and drone as well as their waiting costs.
There are a list of cost induced by the system:
(1) Waiting costs of truck and drone is equal to the waiting fees of truck and drone per unit of time respectively multiplying with the waiting time of truck and drone in each node or each location.
(2) Cost operating truck is the fuel cost of truck in each pathway by summing up cost of operating truck on every arcs the truck goes through.
(3) Cost operating drone can be calculated similarly, but remember that the drone can join the truck after delivery at another location.
Then MILP objective function will be
Minimize
Example below shows that the use of truck only is 25 times more expensive than using combination of drone and truck on the same instance.
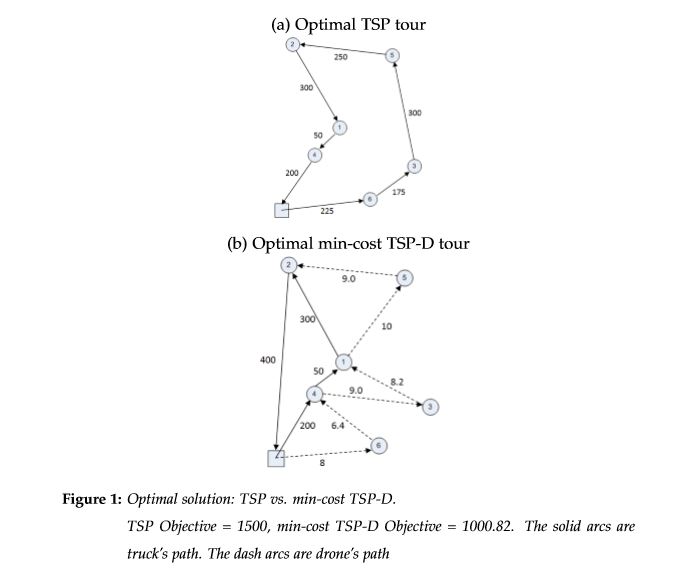 This is called min-cost TSP-D problem. Taking into account the sensitivity analysis, drone speed and endurance, truck speed and number of drone availability and the averaging number of customers served by each drone may yields an improvement in cost savings over TP.
This is called min-cost TSP-D problem. Taking into account the sensitivity analysis, drone speed and endurance, truck speed and number of drone availability and the averaging number of customers served by each drone may yields an improvement in cost savings over TP.
For more detail, please see the reference below.
1. Quang Minh Ha, Yves Deville, Quang Dung Pham, Minh Hoàng Hà. "On the min-cost Traveling Salesman Problem with Drone", Transportation Research Part C: Emerging Technologies, 2018
2. Last mile delivery optimization model with drones.