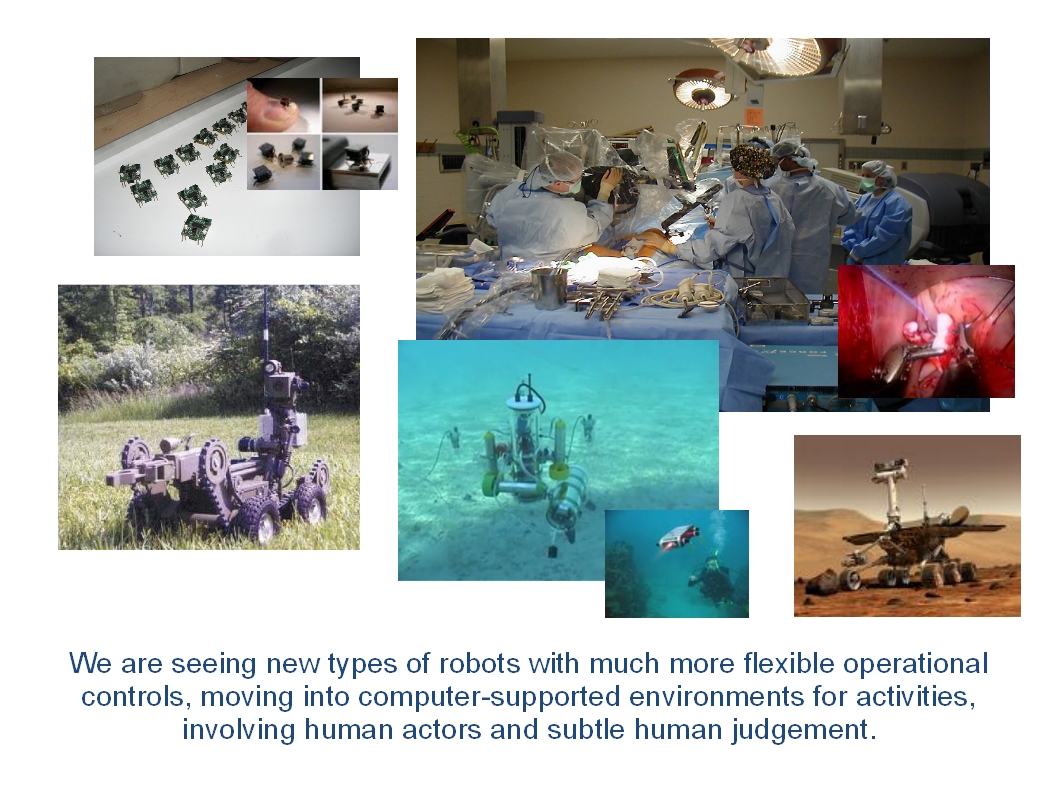
As the images suggest, robots are used in surgery, they are taken underwater, sent to Mars, and into enemy territory or volatile situations to gather intelligence. Given the variety of uses they are designed for, their physical characteristics are purpose-built accordingly to meet particular objectives.
To get a better picture of developments in assistive robotics, the projects funded by the European Commission over recent years can shed light on design, direction and purpose:
Assistance, general (home, entertainment, learning, working, navigation, etc...) includes:
· Robots who are able to operate real-time in densely populated environments, informing and guiding humans (INDIGO, museum guide); safely transport and deliver goods and help people navigate in the streets (EUROPA).
· Interactive, emotionally intelligent companions (robot or virtual) capable of: (1) long-term relationships with humans (LIREC); (2) cognitive companionship (COGNIRON); (3) safely operating and navigating around furniture in homes (ROBOTS@HOME); (4) trolley assistance in public areas such as supermarkets and airports (COMMROB).
· Robots with dexterous and autonomous dual-hand manipulation capabilities and human-robot coordination, for example in the kitchen (DEXMART, PHRIENDS, CHRIS); coordinating with humans in general hands-on labour and in teleworking schemes in hybrid virtual-physical environments (ROBOT@CWE).
Assistance specifically targeting the disadvantaged (elderly, disabled (including children), rehabilitation, etc...) includes:
· Extensive locomotive therapy with robots controlling presence, attention and motivation of patients (MIMICS); robots as "optimal" trainers, exploiting the structure and plasticity of the human sensory-motor systems (HUMOUR); robot-assisted neuro-rehabilitation with human-machine interfaces based on non-invasive neural interfaces and a wearable exoskeleton (EVRYON).
· Robotic toys and game scenarios supporting socialisation and development (IROMEC).
· Robotics, combining cognitive robotics (companionship and guidance) with smart-house capabilities (COMPANIONABLE), or providing porter services in large public areas such as airports (IRPS).
· Electrical brain activity utilised, on the basis of electroencephalograph (eeg) signals, in brain-computer interaction system to decipher intentions, allowing "locked-in" persons to control devices directly with their brain activity (BRAINROBOT, BRAIN2ROBOT).
Assistance to performance-critical services (hospital functions, surgery, driving, flying, emergency, crises, etc...) includes:
· Mechatronic and intelligent cooperation (robot groups or swarms) with human experts in multi-criteria reasoning and decision making scenarios, managing and responding to emergency: (1) to detect and warn about hazardous substances (DIADEM); (2) to cooperate with fire and rescue missions, navigating, searching, identifying and warning about toxic chemicals, bombs and living beings (GUARDIANS, RESCUER).
· Manual task training, including teleoperations and shared control architectures for cooperation between humans and to augment human capabilities: (1) in flight and surgery (REHAB-DUET); (2) by using e.g. robot arms including a complex sensor system and control devices for humanoid operations - complex surgical procedures - exhibiting rich sensory-motor skills and multi-sensory measurement for accuracy and feedback (ACCUROBAS); (3) in mechatronic and intelligent cooperation with surgeons, planning, negotiating and managing uncertainty during keyhole interventions on the brain (ROBOCAST).
· Robot team developed for hospital environment in medicine dispatch, cleaning, guiding patients around, patient-doctor conferencing, patrolling facilities and detecting emergency (IWARD)
Assistance to infrastructural/societal management and control (law enforcement, traffic, rubbish, environment, etc...) Includes:
· Micro helicopters with a bird's eye view capable of navigation, exploration, inspection, searching, monitoring and surveillance (SFLY)
On-ground random foraging agents for exploration, inspection, searching, monitoring and surveillance (SF).
· Robots for inner cities, able to: (1) vacuum-clean streets and transport garbage on demand from citizens (DUSTBOT); (2) help people navigate in the streets and help with monitoring and surveillance (URUS).
· Floating and sensorised robots for monitoring chemical and physical parameters in water (HYDRONET) and underwater robot swarms for harbour safety and security (CO3 AUVs).